List of courses
Introduction to Multicopter Design and Control [多旋翼飞行器设计与控制]
This course is about multicopter design, dynamical model, state estimation, control and decision. It has two salient features: fundamental and systematic.
本门课程讲授多旋翼设计、动态模型建立、状态估计、控制和决策等方面的基础知识。具有两大特点:“基础性”和“系统性”。
Quick access: [Course Center] [Download English PPT] [Download Chinese PPT] [Textbook]
快速跳转链接 : [访问课程中心] [中文课件下载] [英文课件下载] [英文教材购买]
《多旋翼飞行器设计与控制》中英文教材发布
《多旋翼飞行器设计与控制》中文版(英文版于2017年7月已经在[Springer] 出版),在杜光勋博士、赵峙尧博士、戴训华、任锦瑞和邓恒等同学的努力下,经过近一年的反复修订,终于面市了中文版目前在[亚马逊]、 [天猫]、 [当当]、 [京东] 等网站进行销售。
由于本书跨度较大,涉及较多新的专业词汇及新的概念。加上作者和组内同学水平有限,书中若有不当之处,恳请读者指正。我们会不断改进,精益求精,为中国的航空事业贡献自己的一份力量。
网络公开课发布
网络选课方式: 登录中国大学MOOC https://www.icourse163.org/,搜索“多旋翼”即可或直接输入链接(免费):
2018
The Matlab Source Code for Optimization of Multicopter Propulsion System Based on Degree of Controllability

This file set is supporting material for our paper [1]. The optimal design problem of multicopter is considered in this paper. First, the entire multicopter system model is derived, where the propulsor dynamics is considered. Then, based on the complete multicopter model, an optimized design methodology for multicopters based on DoC is proposed. In addition, a step-by-step process is derived from the methodology, which is used to design a compound hexacopter with different required vehicle masses to demonstrate its effectiveness. Further discussions about the design results of the compound hexacopter are presented to demonstrate that the design methodology is effective. [Readme] [Download]
Reference
[1] Guang-Xun Du, Quan Quan, and Dongjie Shi. Optimization of Multicopter Propulsion System Based on Degree of Controllability. Submitted, January, 2018.
2017
Tools and Materials for Failsafe Mechanism Design of Multicopters Based on Supervisory Control Theory
This file set is supporting material for our paper [1]. The abstract of this paper is: In order to handle undesirable failures of a multicopter which occur in either the pre-flight process or the in-flight process, a failsafe mechanism design method based on supervisory control theory is proposed for the semi-autonomous control mode. Failsafe mechanism is a control logic that guides what subsequent action the multicopter should take, by taking account of real-time information from guidance, attitude control, diagnosis, and other low-level subsystems. [Readme] [Download]
Reference
[1] Quan Quan, Zhiyao Zhao, Liyong Lin, Peng Wang, Walter Murray Wonham, and Kai-Yuan Cai. Failsafe Mechanism Design of Multicopters Based on Supervisory Control Theory. online:https://arxiv.org/abs/1704.08605,2017.
The Matlab Source Code of Observability Analysis of the Proposed EKF and the Traditional EKF
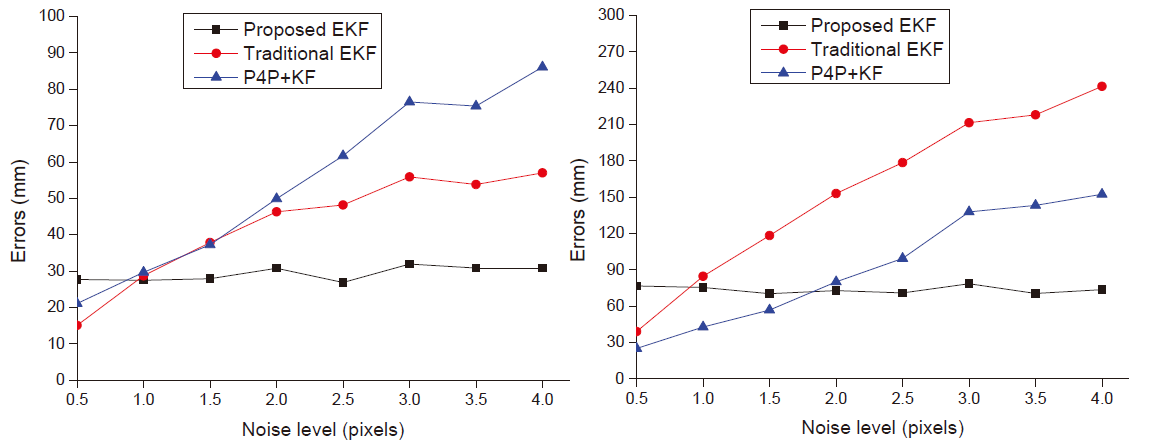
This file set is supporting material for our paper [1]. It performs nonlinear observability analysis for the proposed EKF and the traditional EKF in Section III-B of [1], when only two markers are detected in the camera image. By using this file, it is known that the proposed EKF is still observable with only two markers detected, while the traditional EKF is unobservable in this case. [Readme] [Download]
Reference
[1] Qiang Fu, Quan Quan, and Kai-Yuan Cai. Robust pose estimation for multirotor UAVs using off-board monocular vision, accepted by IEEE Transactions on Industrial Electronics, 2017.[pdf]
2016
The Matlab Source Code of a Performance Prediction Method of Large-scale Stochastic Linear Hybrid Systems

This file set is supporting material for our paper [1]. The problem of performance prediction aims at determining the probability or possibility that the system will remain in a permitted area (safe set) or reach a forbidden area (unsafe set). To develop an analytical performance prediction algorithm for stochastic hybrid system (SHS), especially for large-scale SHS with rare switches, a special class of SHS is focused in this paper, which is called stochastic linear hybrid system (SLHS). Given an initial condition, a hybrid state evolution algorithm is proposed according to the execution of SHS, where Gaussian mixture model is introduced to characterize the distribution of the hybrid state. Then, the health degree is calculated by the predicted hybrid state distribution of SLHS, which transfers the probabilistic distribution into a quantitative index. Finally, a multicopter with sensor anomalies is studied to validate the availability and effectiveness of the proposed method. [Readme] [Download]
Reference
[1] Zhao Z, Quan Q, Cai K-Y. (2016). A Performance Prediction Method of Large-scale Stochastic Linear Hybrid Systems (Submitted).
A Matlab Toolbox for Calculating an Available Control Authority Index of Multicopters
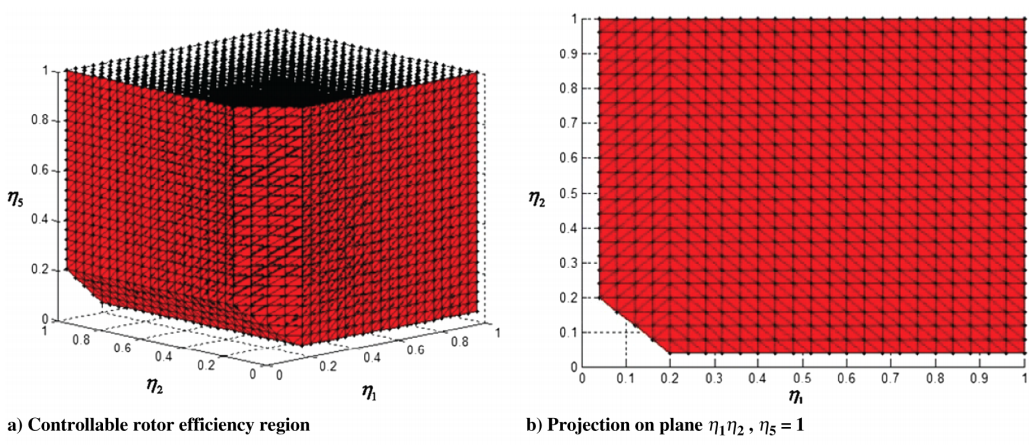
This file set provides a Matlab toolbox for calculating an Available Control Authority Index (ACAI) in our paper. In this paper, an ACAI was introduced to quantify the available control authority of multirotor systems. Based on the ACAI, a new necessary and sufficient condition was given based on a positive controllability theory. The calculation procedure of the ACAI is detailed in this file set. [Readme] [Download]
Reference
[1] Guang-Xun Du, Quan Quan, Binxian Yang, Kai-Yuan Cai. Controllability analysis for multirotor helicopter rotor degradation and failure. Journal of Guidance, Control, and Dynamics, 2015, 38(5): 978-985.
The Matlab Source Code of Computing the Volumes of Reachable Set at the Docking Phase
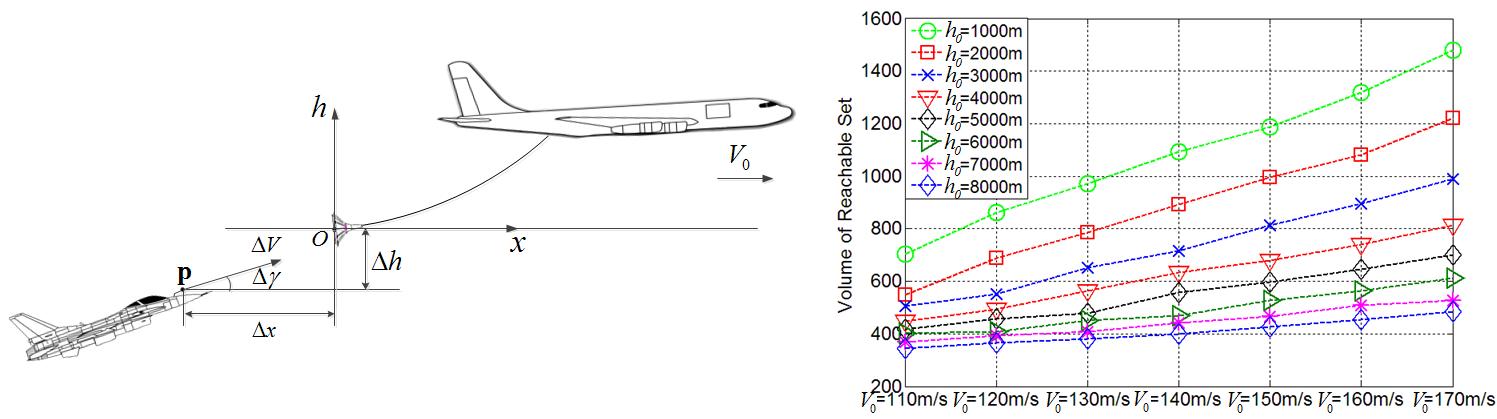
This file is supporting material for our paper [1] which proposes the reachability analysis method to obtain the optimal docking altitude and speed of the tanker aircraft at the docking phase in an Aerial Refueling (AR) process. This file contains the specification about the Matlab source code and the corresponding simulation results of the paper [1]. [Readme] [ Download ]
Reference
[1] Ying Liu, Quan Quan, Guang-Xun Du. (2016). Reachability Analysis on Optimal Altitude and Speed during Docking Phase of Aerial Refueling..
The Matlab Toolbox for Calculating the Degree of Controllability of MultiCopters
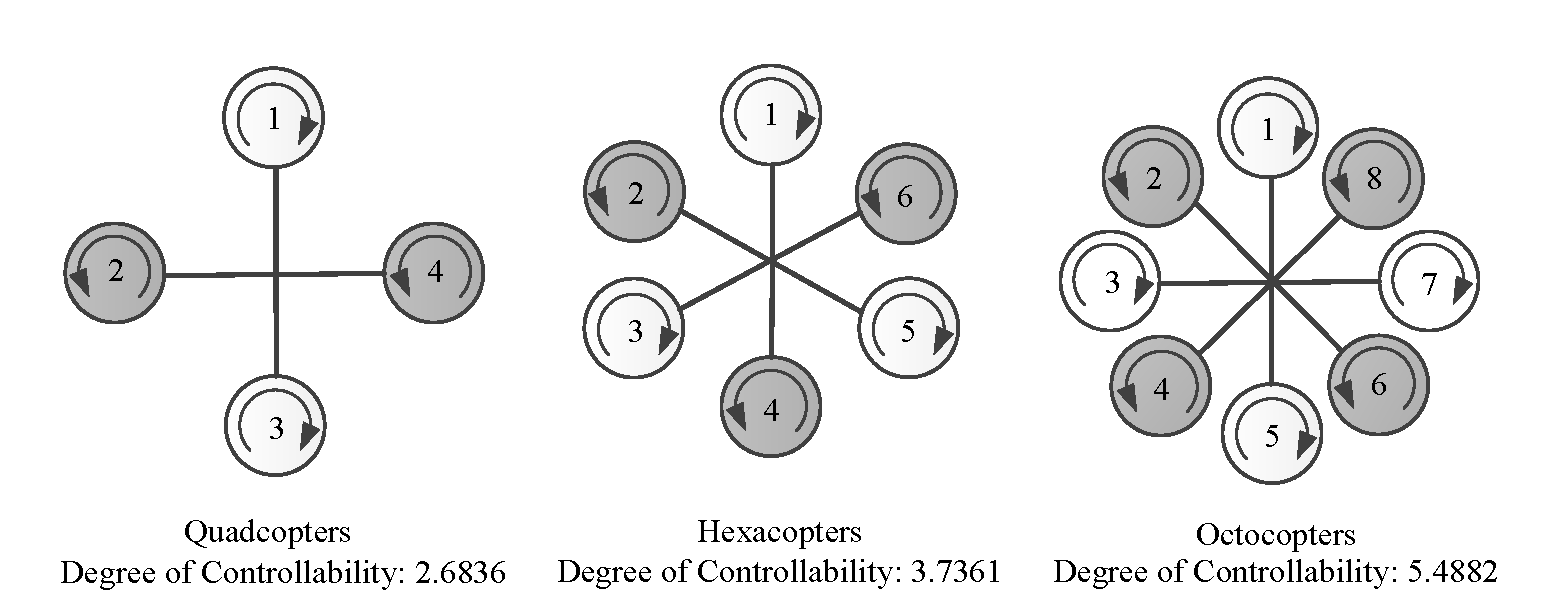
This file set provides a Matlab toolbox for calculating the degree of controllability in our paper. In this paper, a new method is proposed to analyze the flight reliability of multicopters with different configurations. The whole paper studies the following three topics: i) reliability analysis for multicopters with different rotor number; ii) reliability analysis for hexacopters with different rotor configurations; iii) reliability/price ratio analysis for multicopters with different rotor number. All of these are analyzed based on a proper controllability theory. Degree of controllability, which indicates how controllable a system is, is an important concept in controllability theory. According to the degree of controllability, the multicopter's reliability can be indirectly obtained. The calculation procedure of degree of controllability is detailed in this file set. [Readme] [ Download ]
Reference
[1] Dongjie Shi, Binxian Yang, Quan Quan.(2016). Reliability Analysis of Multicopter Configurations Based on Controllability Theory.
A Practical IMU-based Angle Measurement Method for a Single Axis Rotation

A practical method is proposed to measure the angle of a single axis rotation, where the single axis rotation is invisible or hard to access. The rotation from an initial state to a final state is represented by a quaternion consisting of the direction of the rotation axis and its rotation angle. The angle needed to measure corresponds to the rotation angle of the quaternion. The proposed method utilizes the angular velocity of an IMU to compute the direction of the rotation axis by a proposed method. Since the attitude angles of the measured object vary as its rotation angle changes, an equation is established with respect to the unknown rotation angle. Then, an interpolation algorithm is proposed to solve the equation and simulation is further illustrated. Finally, with a turntable and an IMU embedded in Pixhawk, comparative experiments are carried out to validate the proposed method. [Readme] [ Download ]
Reference
[1] Shuaiyong Zheng, Hongxin Dong, Ruifeng Zhang and Quan Quan. (2016). A Practical IMU-based Angle Measurement Method for a Single Axis Rotation.
The Matlab Source Code of a Health Evaluation Method of Multicopters Modeled by Stochastic Hybrid System

We propose a stochastic hybrid system based (SHS-based) health evaluation method for multicopters under the framework of safety decision-making, where different health states and corresponding dynamic behaviors are modeled by SHS. A modified interacting-multiplemodel (IMM)-based algorithm is proposed to estimate real-time distribution of hybrid states, and the health degree is further calculated. The source code contains a case study of a multicopter with sensor anomalies is simulated to validate the effectiveness of the proposed method. Comparisons with the model without health state transitions and the classic IMM algorithm are also made. [Readme] [ Download ]
Reference
[1] Zhiyao Zhao, Quan Quan, Kai-Yuan Cai. (2016). A Health Evaluation Method of Multicopters Modeled by Stochastic Hybrid System.
2015
The Matlab Source Code of Comparisons between an ASDB ILC Method and Existing ILC Methods
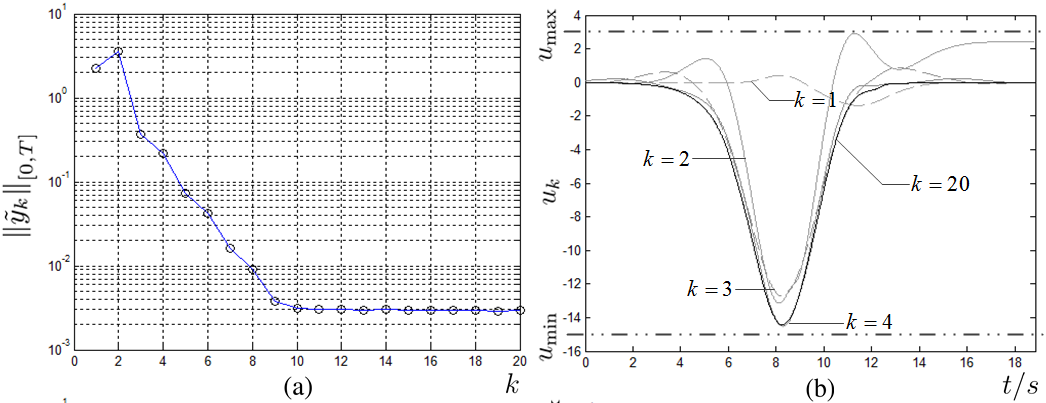
An additive-state-decomposition-based (ASDB) iterative learning control (ILC) method is proposed. Based on this method, the output feedback ILC problem is solved for a class of nonminimum phase (NMP) nonlinear systems with input saturation. The file set illustrates the high convergence rate and the robustness of the ASDB ILC controller, and compares our method (ASDB ILC) with two existing ILC methods. [Readme] [ Download ]
Reference
[1] Zi-Bo Wei, Quan Quan, Kai-Yuan Cai, Output Feedback ILC for a Class of Nonminimum Phase Nonlinear Systems with Input Saturation: An Additive-state-decomposition-based Method.
Dataset and Analysis of Bow Wave Effect Based on Fluent
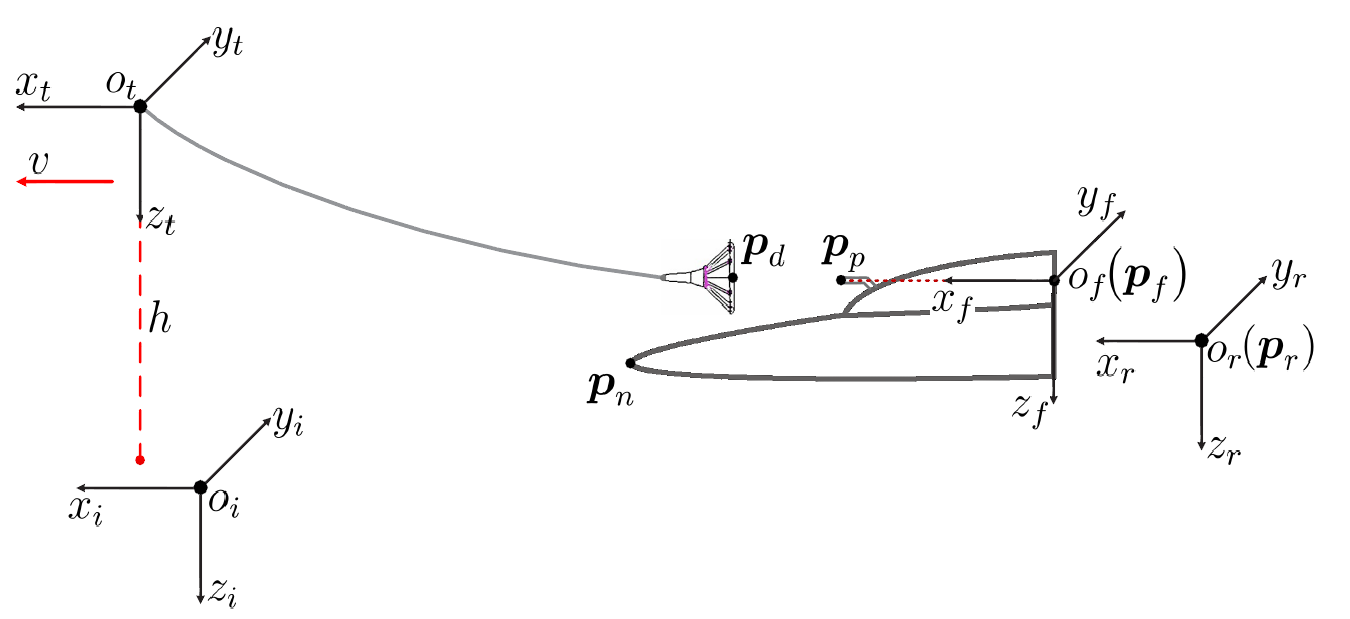
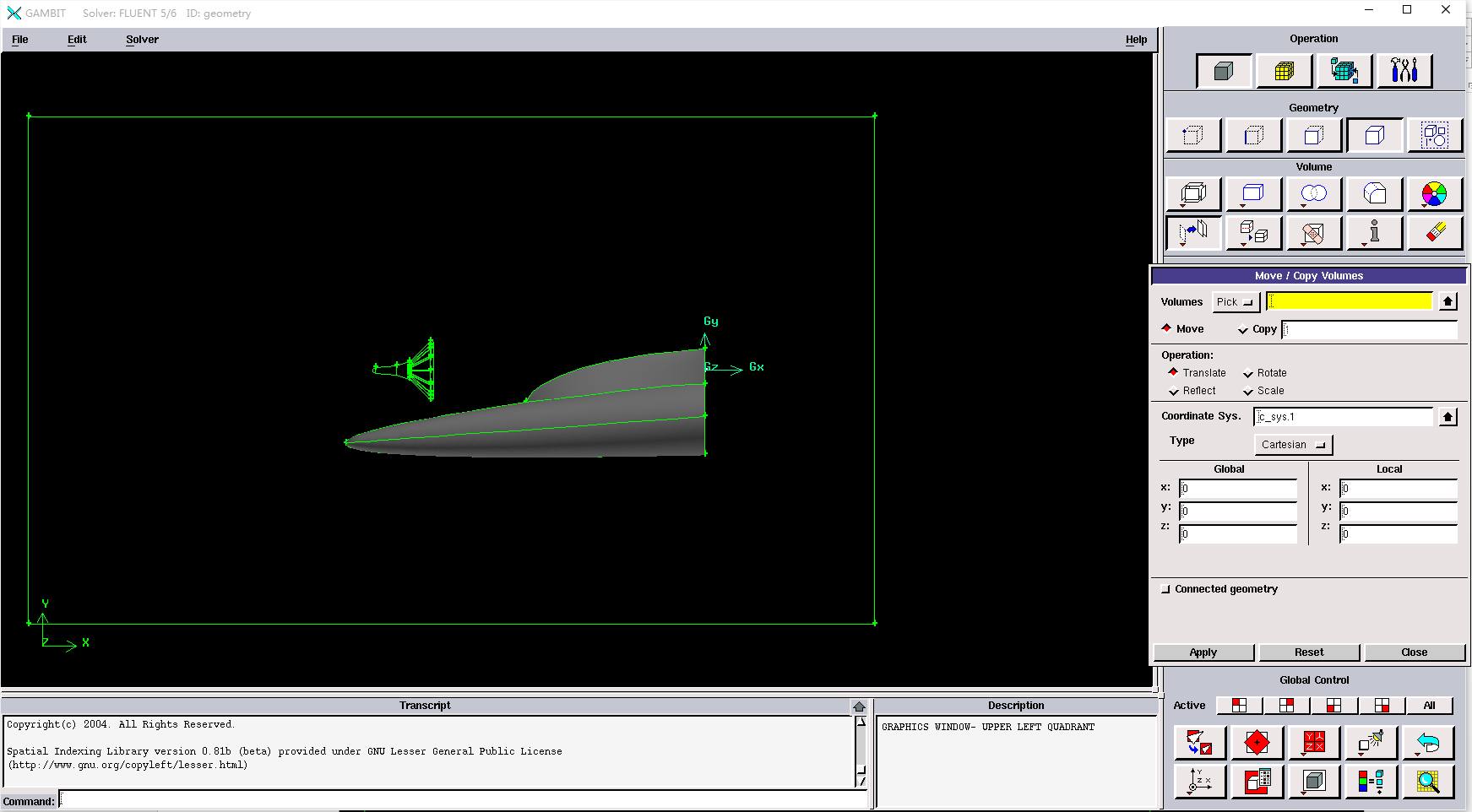
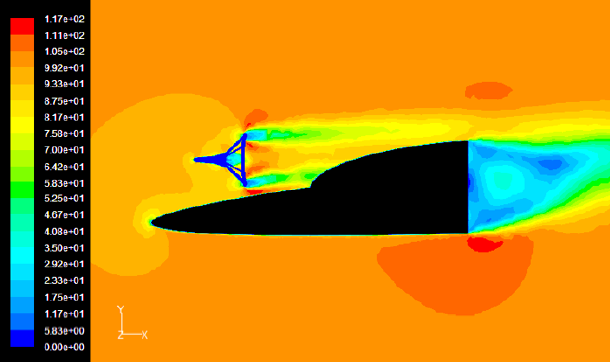

This is a file set which is used to analyze the bow wave effect. The bow wave effect is an important disturbance in the probe-and-drogue refueling. Thus, a series of data are generated by using Fluent, and recorded in the dataset (Excel files).The drogue and the fore body of the receiver are taken into consideration simultaneously. The graphic files used in Fluent and a Fluent case are included in the file set. It also includes two Matlab files which are used to analyze the data. [Readme] [ Download ]
Reference
[1] Zi-Bo Wei, Xunhua Dai, Quan Quan, Kai-Yuan Cai, Drogue Dynamic Model under Bow Wave in Probe-and-drogue Refueling.
Dataset of FDI method Based on Airframe Vibration Signals

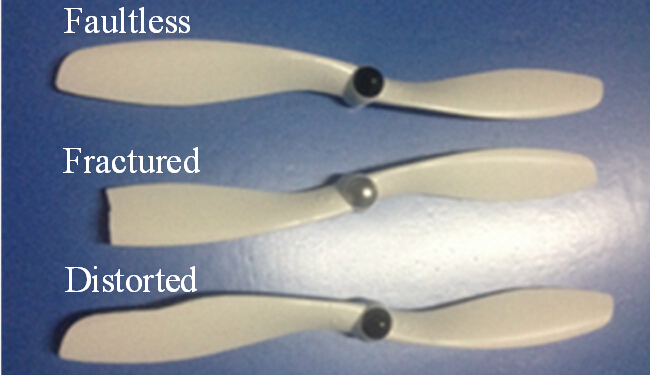
This is a data set including three airframe vibration datasets, a data preprocessing program and a Fault Detection and Identification (FDI) program. The airframe vibration datasets are collected from a micro-quadrotor UAV produced by DJI corporation and the data acquisition equipment is a data acquisition software SensorMonitor installed in iPhone [Readme] [ Download ]
Reference
[1] J. Yan, Z. Zhao, H. Liu, Q. Quan, "Fault Detection and Identification for Quadrotor Using Airframe Vibration Signals: A Data-driven Method". Proceedings of the 34th Chinese Control Conference, July 28-30, 2015, Hangzhou, China [pdf]
Single Axis Rotation Angle Measurement Toolbox Using a Camera and a Checkboard

This is a MATLAB toolbox for angle measurement. The toolbox can be used to measure single axis rotation angles from an image sequence of the checkboard. The angle measurement method consists of two steps: calibration of single axis motion and angle measurement. In the first step, intrinsic parameters and the geometry relation of thecheckboard, the camera and the rotation axis are calibrated by several images without occlusion. Then, the rotation angle of a certain image is measured. [Readme] [ Download ]
Reference
[1] Hongxin Dong, Qiang Fu, Xu Zhao, Quan Quan, Ruifeng Zhang. “A Practical Rotation Angle Measurement Method by Monocular Vision,” Applied Optics, 2015, 54(3): 425–435. [pdf]
2014
Camera Calibration Toolbox for Generic Multiple Cameras
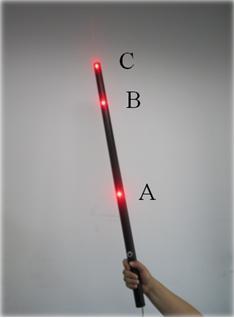
This is a camera calibration toolbox for generic multiple cameras. The toolbox can be used to calibrate: 1) two conventional cameras; 2) two fish-eye cameras; 3) two mixed cameras (e.g. a conventional camera and a fish-eye camera); 4) multiple cameras (each camera can be a conventional camera or a fish-eye camera). The calibration is based on viewing a freely-moving one-dimensional wand that has three collinear feature points. The intrinsic and extrinsic parameters of two/multiple cameras are estimated from point correspondences between the calibration wand and calibration images simultaneously. [Readme] [ Download ]
Reference
[1] Qiang Fu, Quan Quan, Kai-Yuan Cai. "Calibration of multiple fish-eye cameras using a wand." IET Computer Vision. 2015, 9(3): 378-389.[pdf]