Online Papers
Quan Quan, Mengxin Li, Rao Fu
Sky Highway Design for Dense Traffic.16th IFAC Symposium on Control in Transportation Systems CTS 2021,Lille,France,8-10 June 2021, IFAC PapersOnLine 54-2 (2021) 140–145.[pdf]
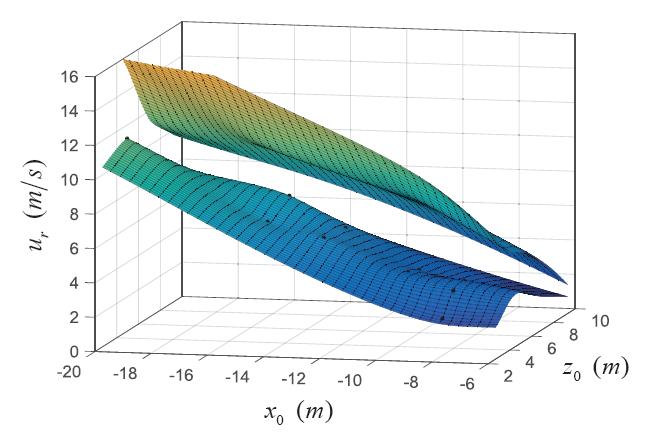
Quan Quan, Rao Fu, Kai-Yuan Cai
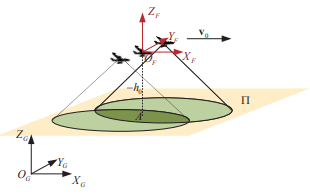
Practical Control for Multicopters to Avoid Non-Cooperative Moving Obstacles.
IEEE Transactions on Intelligent Transportation Systems. Accepted.
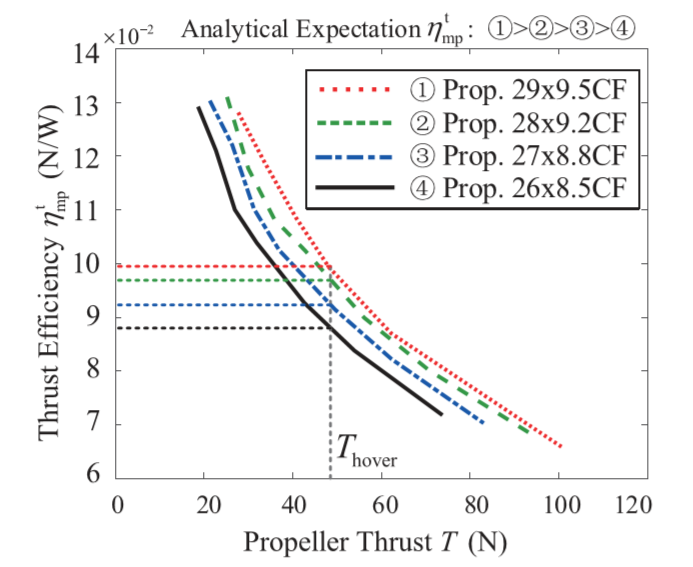
Haotian Zhang, Ziming Song, Shaochang Tan, and Quan Quan.
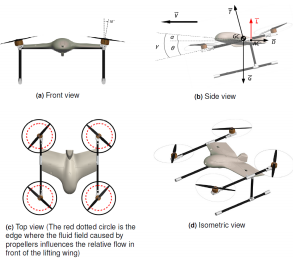
Performance Evaluation and Design Method of Lifting-wing Multicopters.
IEEE/ASME Transactions on Mechatronics. Accepted.
Xunhuai Dai, Quan Quan, and Kai-Yuan Cai.
Design Automation and Optimization Methodology for Electric Multicopter Unmanned Aerial Robots.
IEEE Transactions on Automation Science and Engineering, accepted.
Quan Quan and Kai-Yuan Cai.
Repetitive control for nonlinear systems: an actuator-focussed design method. International Journal of Control
https://www.tandfonline.com/doi/full/10.1080/00207179.2019.1639077
Guang-Xun Du, Quan Quan, Zhiyu Xi, Yang Liu, Kai-Yuan Cai
A Control Performance Index for Multicopters Under Off-nominal Conditions
2021
Li Yue, Yan Gao, Yin Beibei, Quan Quan.
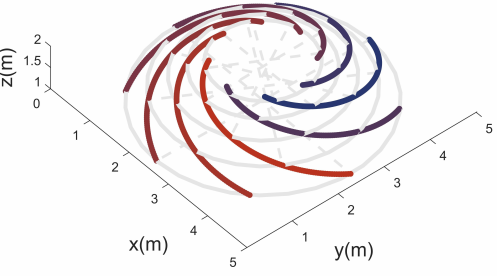
Bee-Dance-Inspired UAV Trajectory Pattern Design for Target Information Transfer without Direct Communication.
The 40th Chinese Control Conference(CCC), Shanghai, China, July 26-28,2021.[pdf]
Kun Xiao, Yao Meng, Xunhua Dai, Haotian Zhang, Quan Quan.
A Lifting Wing Fixed on Multirotor UAVs for Long Flight Ranges.
2021 International Conference on Unmanned Aircraft Systems (ICUAS), Athens, Greece, June 15-18, 2021.[pdf]
Shuai Wang, Xunhua Dai, Chenxu Ke, Quan Quan.
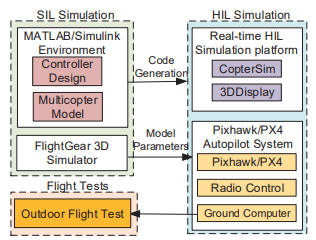
RflySim:A Rapid Multicopter Development Platform for Education and Research Based on Pixhawk and MATLAB.
2021 International Conference on Unmanned Aircraft Systems (ICUAS), Athens, Greece, June 15-18, 2021.[pdf]
Pengda Mao, Yan Gao, Bo Wang, An Yan, Xiaoyu Chi, Quan Quan.
Fast Light Show Design Platform for K-12 Children.
2021 IEEE International Conference on Robotics and Automation (ICRA), Xi'an, China, May 30 -June 5, 2021.[pdf]
Xunhuai Dai, Chenxu Ke, Quan Quan, and Kai-Yuan Cai.
RFlySim: Automatic Test Platform for UAV Autopilot Systems with FPGA-based Hardware-in-the-loop Simulations.
Aerospace Science and Technology 2021, 114, 106727.[pdf]
Ying Liu, Jun Wang, Quan Quan, Guang-Xun Du, Lei Yang.
Reachability analysis on optimal trim state for aerial docking.
Aerospace Science and Technology, 2021, 110, 106471.[pdf]
Ying Liu, Zhiyao Zhao, Haibiao Ma, Quan Quan.
A stochastic approximation method for probability prediction of docking success for aerial refueling.
Applied Soft Computing, 2021, 103, 107139.[pdf]

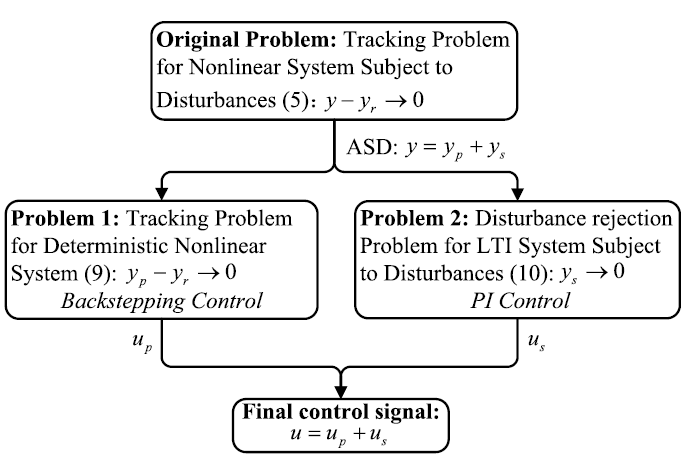
Jinrui Ren, Quan Quan, Haibiao Ma, Kai-Yuan Cai.
Additive-state-decomposition-based station-keeping control for autonomous aerial refueling.
Science China Information Sciences. 2021, 64, 219202.[pdf]
Xunhua Dai, Chenxu Ke, Quan Quan, and Kai-Yuan Cai.
Simulation Credibility Assessment Methodology With FPGA-based Hardware-in-the-Loop Platform
IEEE Transactions on Industrial Electronics. 2021, 68(4):3282-3291.[pdf]
2020
Quan Quan, Xunhua Dai, Shuai Wang.
Multicopter Design and Control Practice: A Series Experiments Based on MATLAB and Pixhawk.
Springer, Singapore, 2020.[pdf]

Quan Quan, Kai-Yuan Cai.
Filtered Repetitive Control with Nonlinear Systems.
Springer, Singapore, 2020.[pdf]
Course1.Introduction[ppt] Course2.Preliminaries[ppt] Course3.Repetitive Control for Linear Systems[ppt] Course4.Robustness Analysis of Repetitive Control[ppt] Course5.Feedback Linearization Method[ppt] Course6.Adaptive-Control-Like Method[ppt] Course7.Additive State Decomposition Method I[ppt] Course8.Additive State Decomposition Method II[ppt] Course9.An Actuator-Focused Design Method[ppt] Course10.A Contraction Mapping Method[ppt]
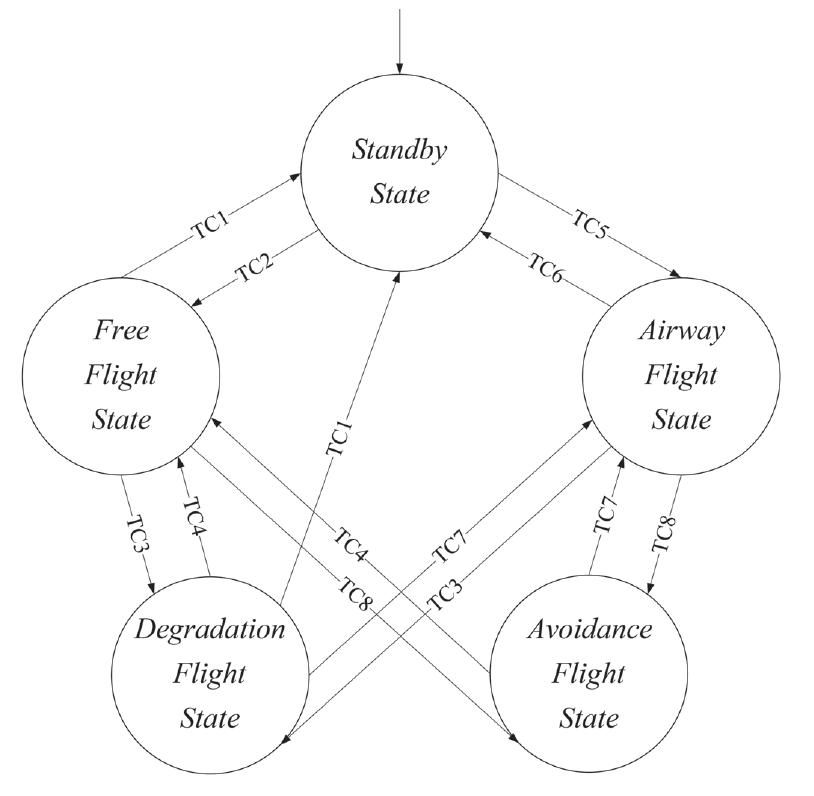
Quan Quan, Zhiyao Zhao, Liyong Lin, Peng Wang , Walter Murray Wonham ,Kai-Yuan Cai.
Failsafe Mechanism Design of Multicopters Based on Supervisory Control Theory.
IET Cyber-Systems and Robotics, 2020, 2(1): 31 – 42.[pdf]

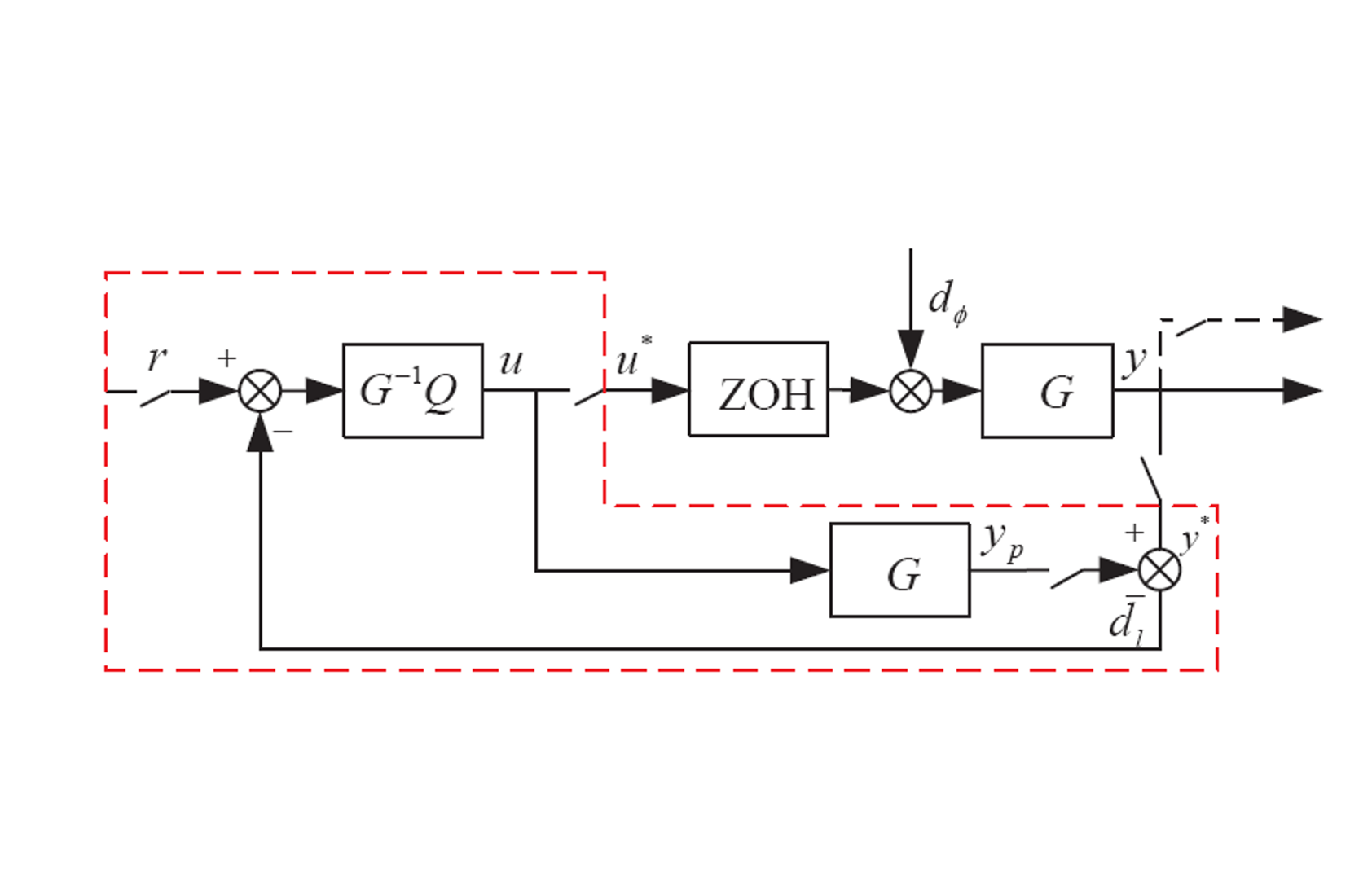
Quan Quan, Kai-Yuan Cai
Sampled-data repetitive control for a class of non-minimum phase nonlinear systems subject to period variation
International Journal of Systems Science, 51:4, 704-718.[pdf]
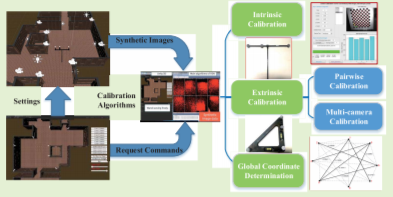
Heng Deng, Kun Yang, Quan Quan, Kai-Yuan Cai.
Accurate and Flexible Calibration Method for a Class of Visual Sensor Networks.
IEEE Sensors Journal, 2020, 20(6): 3257-3269.[pdf]

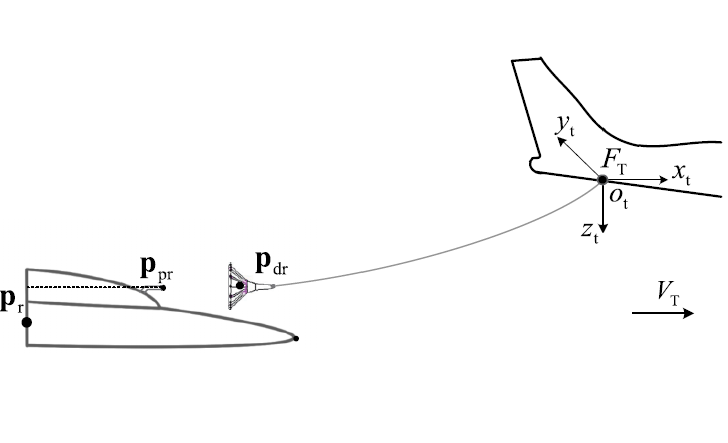
Xunhua Dai, Zi-Bo Wei, Quan Quan, and Kai-Yuan Cai.
Hose-drum-unit Modeling and Control for Probe-and-drogue Autonomous Aerial Refueling.
IEEE Transactions on Aerospace and Electronic Systems, 2020, 56(4): 2779-2791.[pdf]
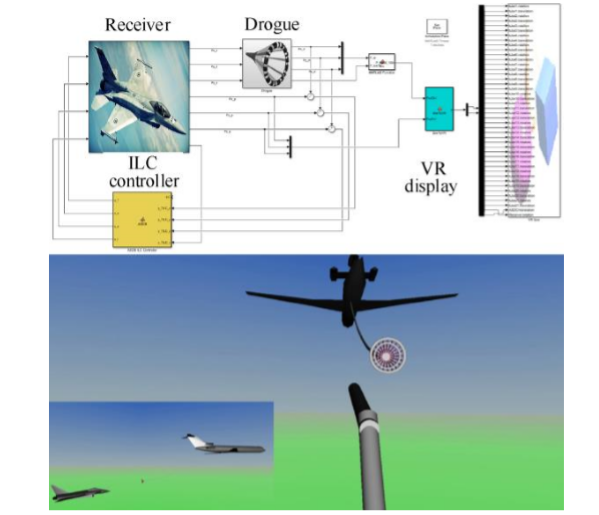
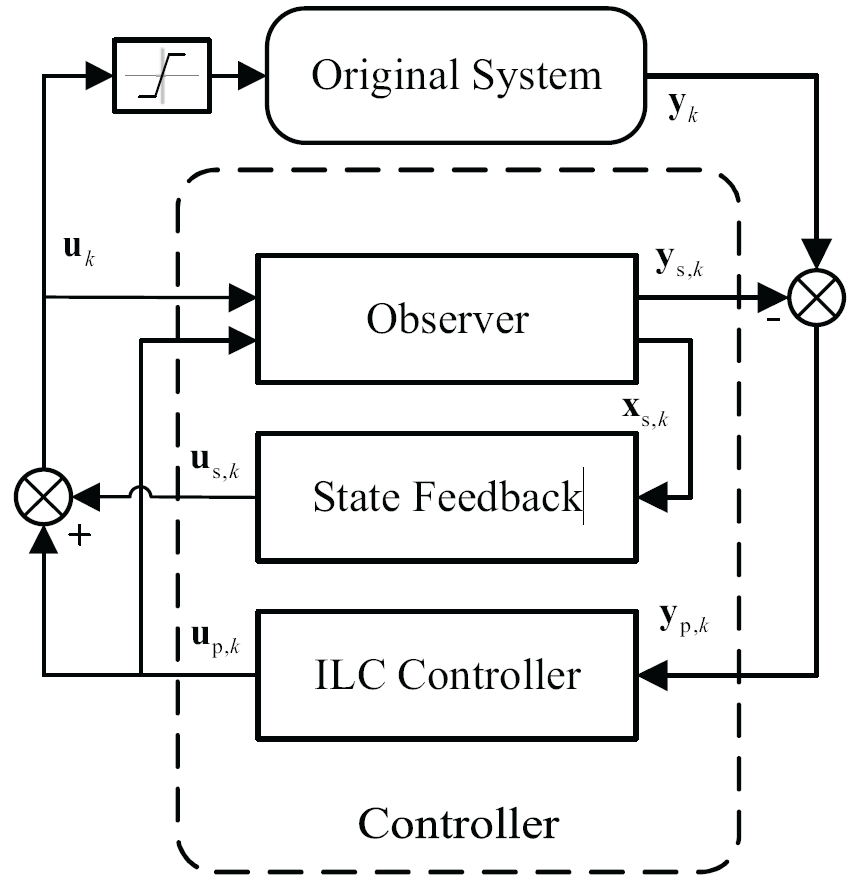
Jinrui Ren, Quan Quan, Cunjia Liu, Kai-Yuan Cai.
Docking Control for Probe-Drogue Refueling: An Additive-State-Decomposition-Based Output Feedback Iterative Learning Control Method.
Chinese Journal of Aeronautics, 2020, 33(3): 1016-1025.[pdf]

Heng Deng, Qiang Fu, Quan Quan, Kun Yang, Kai-Yuan Cai.
Indoor Multi-Camera Based Testbed for 3D Tracking and Control of UAVs.
IEEE Transactions on Instrumentation and Measurement, 2020, 69(6): 3139-3156.[pdf]
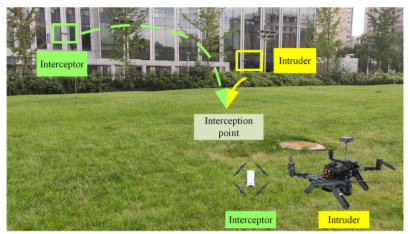
Kun Yang, Quan Quan.
An Autonomous Intercept Drone with Image-Based Visual Servo.
IEEE International Conference on Robotics and Automation, Paris France, Jun. 2020.[pdf]
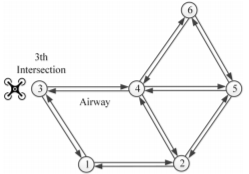
Xin He, Quan Quan.
Air Traffic Network Generation for UAVs at a Low Altitude Based on Digital Maps.
The 39th Chinese Control Conference, Shengyang, July, 2020.[pdf]
2019

Guang-Xun Du and Quan Quan.
Optimization of Multicopter Propulsion System Based on Degree of Controllability.
AIAA Journal of Aircraft, 2019, 56(5): 2062-2069.[pdf]
Jinrui Ren, Xunhua Dai, Quan Quan, Zi-Bo Wei and Kai-Yuan Cai
Reliable Docking Control Scheme for Probe–Drogue Refueling[J]
Journal of Guidance, Control, and Dynamics, 2019, 42(11): 2511-2520.[pdf]
Xudong Yan, Heng Deng, Quan Quan
Active Infrared Coded Target Design and Pose Estimation for Multiple Objects.
2019 IEEE/RSJ International Conference on Intelligent Robots and Systems, Macau, Nov. 2019.[pdf]
Bai-Hui Du, Andrey Polyakov, Gang Zheng and Quan Quan
Quadrotor trajectory tracking by using fixed-time differentiator
International Journal of Control, 2019, 92(12): 2854–2868.[pdf]
Ke Dong, Quan Quan and W. Murray Wonham
Failsafe mechanism design for autonomous aerial refueling using state tree structures.
Unmanned Systems, 2019, 07(04): 261–279.[pdf]
Code: https://github.com/KevinDong0810/Failsafe-Design-for-AAR-using-STS
Xunhua Dai, Quan Quan, Jinrui Ren and Kai-Yuan Cai
Efficiency Optimization and Component Selection for Propulsion Systems of Electric Multicopters
IEEE Transactions on Industrial Electronics, vol. 66, no. 10, pp. 7800–7809, 2019.[pdf]

Xunhua Dai, Quan Quan, Jinrui Ren and Kai-Yuan Cai
An Analytical Design Optimization Method for Electric Propulsion Systems of Multicopter UAVs with Desired Hovering Endurance.
IEEE/ASME Transactions on Mechatronics, 2019, 24: 228-239.[pdf]
2018
Jinrui Ren, Quan Quan, Li-Bing Zhao, Xunhua Dai and Kai-Yuan Cai
Two-degree-of-freedom attitude tracking control for bank-to-turn aerial vehicles: An additive-state-decomposition-based method.
Aerospace Science and Technology, 2018, 77: 409-418.[pdf]

Quan Quan, Kai-Yuan Cai
Saturated repetitive control for a class of nonlinear systems: A contraction mapping method.
Systems & Control Letters, 2018, 122: 93-100.[pdf]

Xunhua Dai, Quan Quan, Jinrui Ren, Kai-Yuan Cai
Iterative learning control and initial value estimation for probe–drogue autonomous aerial refueling of UAVs.
Aerospace Science and Technology, 2018, 82: 583-593.[pdf]
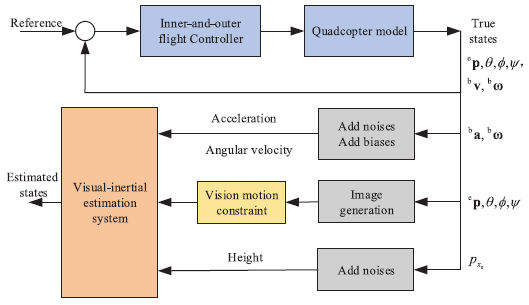
Heng Deng, Usman Arif, Qiang Fu, Zhiyu Xi, Quan Quan and Kai-Yuan Cai
Visual–inertial estimation of velocity for multicopters based on vision motion constraint.
Robotics and Autonomous Systems. 2018, 107:262-279. [pdf]
Xunhua Dai, Quan Quan, Jinrui Ren, Zhiyu Xi and Kai-Yuan Cai
Terminal Iterative Learning Control for Autonomous Aerial Refueling Under Aerodynamic Disturbances.
Journal of Guidance, Control, and Dynamics. 2018, 41(7):1576-1583. [pdf]
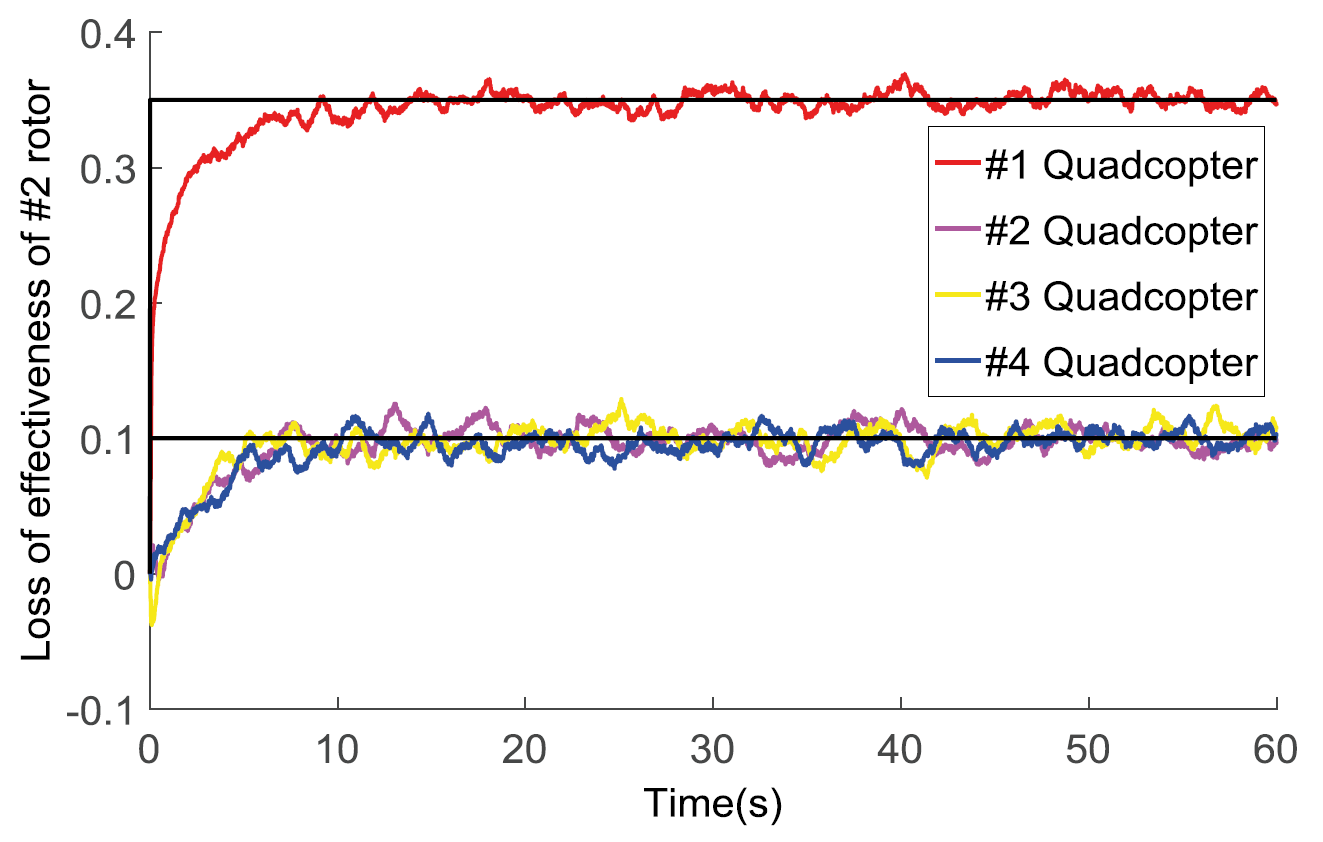
Hepeng Zhang, Zhiyao Zhao, Quan Quan
Fault Detection and Diagnosis of the Homogenous Quadcopter Team in the Presence of Wind Disturbance.
International Federation of Automatic Control (IFAC), August 29-31, 2018, Warsaw, Poland. [pdf]
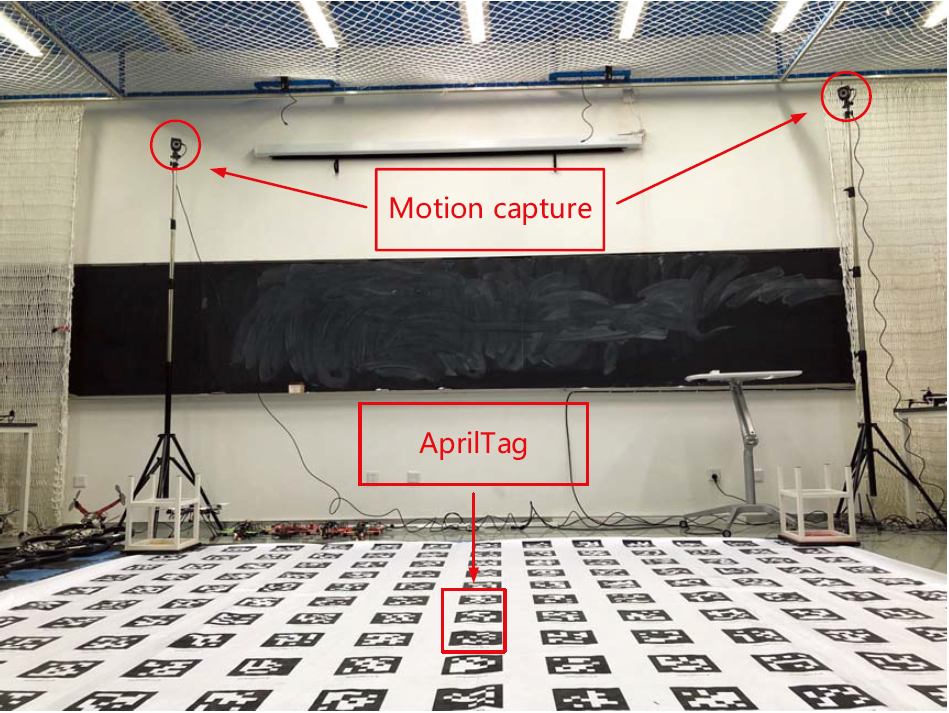
Zhenglong Guo, Qiang Fu, Quan Quan
Pose estimation for multicopters based on monocular vision and AprilTag.
Proceedings of the 37th Chinese Control Conference (CCC), July 25-27, 2018, Wuhan, China.[pdf]

Gao Yan, Dai Xunhua, Quan Quan.
Vision-Based Robust Position Estimation in Probe-and-Drogue Autonomous Aerial Refueling.
IEEE/CSAA Guidance, Navigation and Control Conference, Xiamen, 2018. [pdf]
Chenxu Ke, Jinrui Ren, Quan Quan.
Saturated D-type ILC for Multicopter Trajectory Tracking Based on Additive State Decomposition.
2018 IEEE 7th Data Driven Control and Learning Systems Conferenc, May 25-27, 2018, Enshi, China.[pdf]
Mengxin Li, Heng Deng, Zhenglong Guo, Quan Quan
A case study on local decentralized air traffic protocol for multiple multicopters.
The 33rd Youth Academic Annual Conference of Chinese Association of Automation (YAC), May 18-20, 2018, Nanjing, China. [pdf]
2017
Guang-Xun Du, Quan Quan.
Controllability analysis and degree of controllability for multicopters considering the product of inertia.
System Engineering and Electronics, 2017, 39(11): 2522-2528. (in Chinese) [pdf]
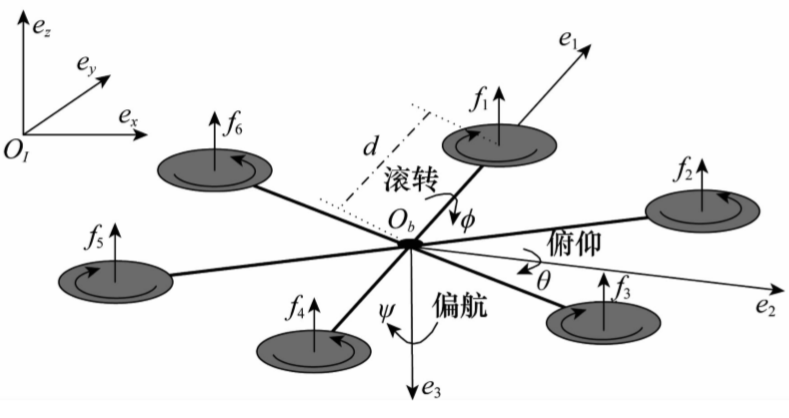
Quan Quan
Introduction to Multicopter Design and Control
Springer, Singapore, 2017. [Contents] [Chapter 2]
Qiang Fu, Quan Quan, Kai-Yuan Cai.
Robust Pose Estimation for Multirotor UAVs Using Off-board Monocular Vision.
IEEE Transactions on Industrial Electronics. 2017, 64(10):7942-7951. [pdf] [Toolbox]

Quan Quan, Kai-Yuan Cai.
A new generator of causal ideal internal dynamics for a class of unstable linear differential equations.
International Journal of Robust and Nonlinear Control. 2017, 27(12):2086-2101. [pdf]

Dongjie Shi, Xunhua Dai, Xiaowei Zhang, and Quan Quan
A Practical Performance Evaluation Method for Electric Multicopters
IEEE/ASME Transactions on Mechatronics. 2017, 22(3):1337-1348. [pdf] http://flyeval.com/
Zi-Bo Wei, Quan Quan, Kai-Yuan Cai
Output Feedback ILC for a Class of Nonminimum Phase Nonlinear Systems with Input Saturation: An Additive-state-decomposition-based Method
IEEE Transactions on Automatic Control. 2017, 62(1):502-508.[pdf] [ Toolbox ]
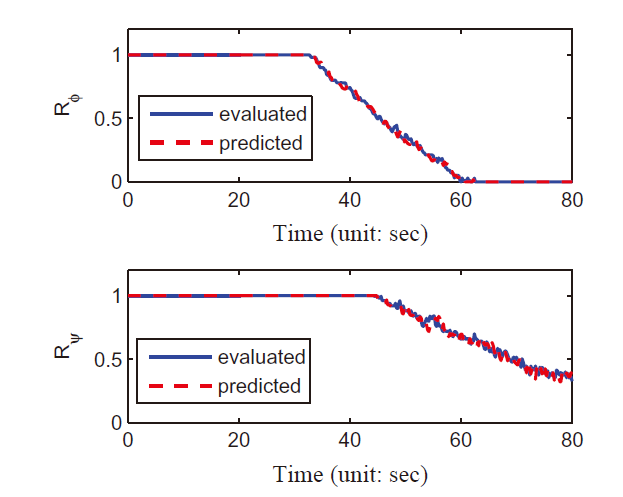
Zhiyao Zhao, Quan Quan, Kai-Yuan Cai
A health performance prediction method of large-scale stochastic linear hybrid systems with small failure probability
Reliability Engineering and System Safety, 2017, 165: 74–88. [pdf] [Toolbox]
Zhiyao Zhao, Quan Quan, Kai-Yuan Cai
A modified profust-performance-reliability algorithm and its application to dynamic systems
Journal of Intelligent and Fuzzy Systems 2017, 32(1): 643-660. [pdf]

Zhiyao Zhao, Quan Quan, Kai-Yuan Cai
A Health Evaluation Method of Multicopters Modeled by Stochastic Hybrid System
Aerospace Science and Technology 2017, 68: 149–162. [pdf] [ Toolbox ]
Jinrui Ren, Zhiyu Xi, Li-Bing Zhao and Quan Quan
Transient tracking performance improvement for nonlinear nonminimum phase systems: an additive-state-decomposition-based control method
International Journal of Systems Science, 2017, 48(10): 2157–2167. [pdf]
Jing Zhang, Guang-Xun Du, Quan Quan
Initial Research on Vibration Reduction for Quadcopter Attitude Control: An Additive-state-decomposition-based Dynamic Inversion Method.
2017 Chinese Automation Congress (CAC), Qct 20-22, 2017, Jinan, China. [pdf]
Hai-Biao Ma, Guang-Xun Du, Hui Zhang, Quan Quan
Reachability conditions of UAVs net recovery based on pseudo-spectral methods.
2017 Chinese Automation Congress (CAC), Qct 20-22, 2017, Jinan, China. [pdf]
2016

Jia-Ning Fu, Qiang Fu, Arif Usman and Quan Quan
A Pose Estimation Method of a Moving Target Based on Off-board Monocular Vision
Proceedings of 2016 IEEE Chinese Guidance, Navigation and Control Conference, August 12-14, 2016 Nanjing, China.[pdf]

Yao Luo, Jiang Yan, Zhiyao Zhao, Shuaishuai Yang and Quan Quan
A Pesticide Spraying Mission Assignment Performed by Multi-Quadcopters and Its Simulation Platform Establishment
Proceedings of 2016 IEEE Chinese Guidance, Navigation and Control Conference, August 12-14, 2016 Nanjing, China.[pdf]

Zi-Bo Wei, Xunhua Dai, Quan Quan, Kai-Yuan Cai
Drogue Dynamic Model under Bow Wave Effect in Probe and Drogue Aerial refuelling
IEEE Transactions on Aerospace and Electronic Systems, 2016, 52(4): 1728-1742.[pdf] [ Toolbox ]
Yang-Guang Cai,Zi-Bo Wei, Quan Quan
Consolidated iterative learning control and a preliminary case study
Control Conference (CCC), 2016 35th Chinese. IEEE, 2016: 3268-3273.[pdf]

Dongjie Shi,Binxian Yang, Quan Quan
Reliability analysis of multicopter configurations based on controllability theory
Control Conference (CCC), 2016 35th Chinese. IEEE, 2016: 6740-6745.[pdf]
Zi-Bo Wei, Jin-Rui Ren, Quan Quan
Further results on additive-state-decomposition-based output feedback tracking control for a class of uncertain nonminimum phase nonlinear systems
Control and Decision Conference (CCDC), 2016 Chinese. IEEE, 2016: 6557-6562.[pdf]

Jin-Rui Ren, Quan Quan
Initial research on stability margin of nonlinear systems under additive-state-decomposition-based control framework
Control and Decision Conference (CCDC), 2016 Chinese. IEEE, 2016: 5766-5771.[pdf]
Xunhua Dai,Zi-Bo Wei, Quan Quan
Modeling and simulation of bow wave effect in probe and drogue aerial refueling
Chinese Journal of Aeronautics, 2016, 29(2) : 448-461.[pdf]
Ying Liu, Guang-Xun Du, Quan Quan, Yun-Chuan Tian
Reachability calculation for aircraft maneuver using Hamilton-Jacobi function
Acta Automatica Sinica, 2016, 42(3) : 347-357. (in Chinese) [pdf]
Quan Quan, Guang-Xun Du, Kai-Yuan Cai
Proportional-Integral Stabilizing Control of a Class of MIMO Systems Subject to Nonparametric Uncertainties by Additive-State-Decomposition Dynamic Inversion Design
IEEE/ASME Transactions on Mechatronics. 2016, 21(2) :1092 – 1101.[pdf]

Quan Quan, Kai-Yuan Cai
A New Continuous-Time Equality-Constrained Optimization Method to Avoid Singularity
IEEE Transactions on Neural Networks and Learning Systems. 2016, 27(2): 262-272.[pdf]
2015
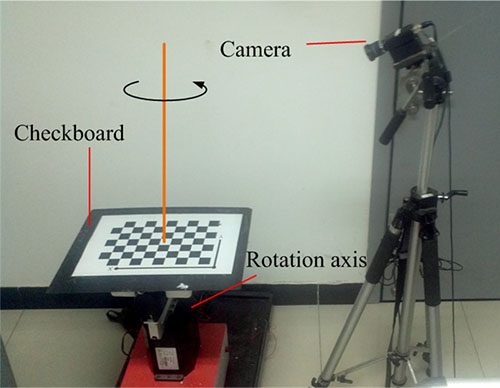
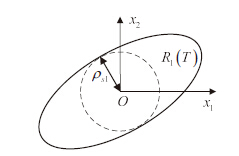
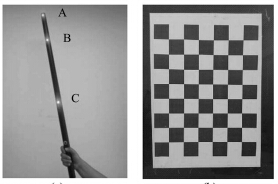
Qiang Fu, Quan Quan, Kai-Yuan Cai
Calibration of Multiple Fish-Eye Cameras Using a Wand
Jiang Yan, Zhiyao Zhao, Haoxiang Liu, Quan Quan
Fault Detection and Identification for Quadrotor Based on Airframe Vibration Signals: A Data-Driven Method
Proceedings of the 34th Chinese Control Conference, July 28-30, 2015, Hangzhou, China [pdf] [Data]
Chuang Li, Hongxin Dong, Quan Quan
A Mismatching Eliminating Method Based on Camera Motion Information
Proceedings of the 34th Chinese Control Conference, July 28-30, 2015, Hangzhou, China [pdf]

Quan Quan
Decryption of Multirotor Development (解密多旋翼发展进程)
Robot Industry, 2015, 2: 72-83. (in Chinese) [pdf]

Quan Quan, Kai-Yuan Cai
Repetitive Control for TORA Benchmark: An Additive-state-decomposition-based Approach
International Journal of Automation and Computing, 2015, 12 (3): 289-296 [pdf]

Guang-Xun Du, Quan Quan, Kai-Yuan Cai
Controllability Analysis and Degraded Control for a Class of Hexacopters Subject to Rotor Failures
Journal of Intelligent & Robotic Systems , 2015, 78(1): 143-157. [pdf] [ Toolbox ]

Guang-Xun Du, Quan Quan, Binxian Yang and Kai-Yuan Cai
Controllability Analysis for Multirotor Helicopter Rotor Degradation and Failure
Journal of Guidance, Control, and Dynamics, 2015, 38(5): 978-985.doi: 10.2514/1.G000731 [pdf]
Quan Quan, Kai-Yuan Cai, Hai Lin
Additive-State-Decomposition-Based Tracking Control Framework for a Class of Nonminimum Phase Systems with Measurable Nonlinearities and Unknown Disturbances
International Journal of Robust and Nonlinear Control, 2015,25(2):163-178. [pdf]
2014
Guang-Xun Du, Quan Quan
Degree of Controllability and Its Application in Aircraft Flight Control
Journal of System Science and Mathematical Science, 2014 Vol. 34 (12): 1578-1594. (in Chinese) [pdf]
Quan Quan, Hai Lin, Kai-Yuan Cai
Output Feedback Tracking Control by Additive State Decomposition for a Class of Uncertain Systems
International Journal of Systems Science, 2014, 45(9): 1799–1813. [pdf]

Quan Quan, Zibo Wei, Jun Gao, Ruifeng Zhang, Kai-Yuan Cai
A Survey on Modeling and Control Problems for Probe and Drogue Autonomous Aerial Refueling at Docking Stage
Acta Aeronautica ET Astronautica Sinica, 2014, 35(9): 2390-2410.(in Chinese) [pdf]

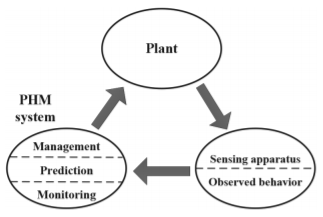
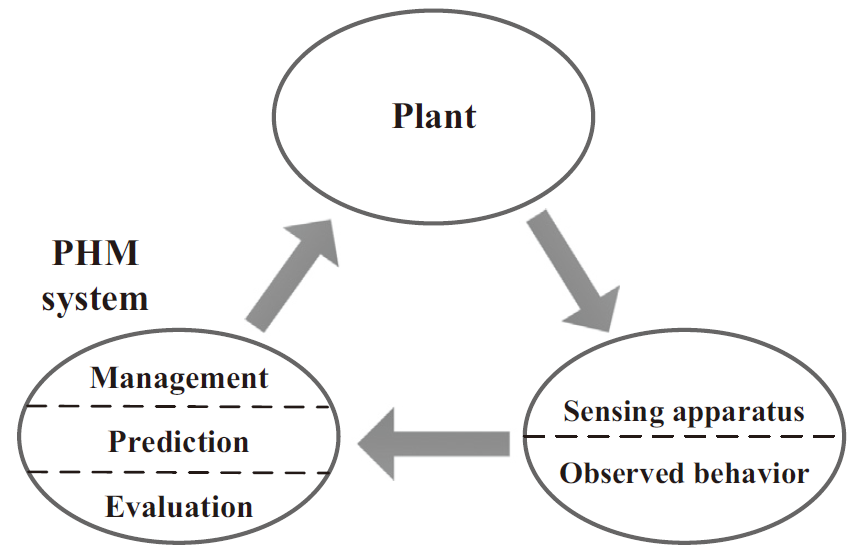
Zhiyao Zhao, Quan Quan, Kai-Yuan Cai.
A Profust Reliability Based Approach to Prognostics and Health Management
IEEE Transaction on Reliability, 2014, 63(1), 26-41 [pdf]
Qiang Fu, Quan Quan, Kai-Yuan Cai
Calibration Method and Experiments of Multi-Camera’s Parameters Based on Freely Moving One-Dimensional Calibration Object
Control Theory & Applications,2014,31(8), 1018-1024.(in Chinese) [pdf]

Bin Liu, Zhiyao Zhao, Binxian Yang, Quan Quan, Kai-Yuan Cai
A Real-Time Assessment Approach to Quadrotor Flight Control Capability
The 33rd Chinese control conference, Nanjing, 2014, 3112-3117. (in Chinese) [pdf]
Siyang Deng, Guang-Xun Du, Quan Quan, Kai-Yuan Cai
Tracking Control of a Small Fixed-Wing UAV Based on Additive-State-Decomposition-Based Dynamic Inversion Method
The 33rd Chinese control conference, Nanjing, 2014, 3625-3631.(in Chinese) [pdf]
2013
Quan Quan, Kai-Yuan Cai
Stability analysis of a class of neutral type systems in a critical case without restriction on the principal neutral
Asia Journal of Control, 2013, 15(6), 1858-1861 [pdf]
Quan Quan, Kai-Yuan Cai
Additive-State-Decomposition-Based Tracking Control for TORA Benchmark
Journal of Sound and Vibration, 2013, 332(20), 4829-4841 [pdf]
Quan Quan, Kai-Yuan Cai
Internal-Model-Based Control to Reject an External Signal Generated by a Class of Infinite-Dimensional Systems
International Journal of Adaptive Control And Signal Processing, 2013, 27(5): 400-412. [pdf]
Weize Zhang, Quan Quan, Ruifeng Zhang, Kai-Yuan Cai
New Transition Method of a Ducted-Fan Unmanned Aerial Vehicle
Journal of Aircraft, 2013, 50(4), 1131-1140. [pdf]
Zhiyao Zhao, Quan Quan, Kai-Yuan Cai
A health monitoring method for Li-ion batteries based on profust reliability theory
Chemical Engineering Transactions, 2013, 33: 961-966. [pdf]
Guang-Xun Du, Quan Quan, Kai-Yuan Cai
Additive-state-Decomposition-Based Dynamic Inversion stabilized Control of A Hexacopter subject to Unknown Propeller Damages
The 32nd Chinese control conference, Xi’an, 2013, 6231-6236 [pdf]
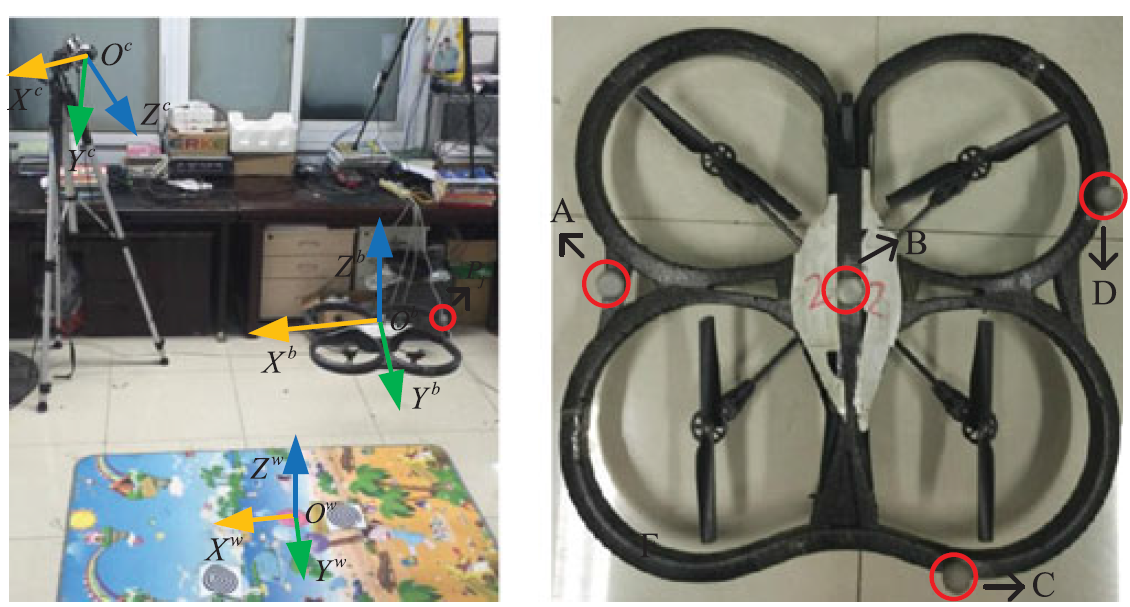
Hui Zhang, Zibo Wei, Quan Quan, Kai-Yuan Cai
Ardrone Quadrotor Modeling and Additive-output-decomposition Based Trajectory Tracking
The 32nd Chinese control conference, Xi’an, 2013, 4946-4951.(in Chinese) [pdf]
Binxian Yang, Guang-Xun Du, Quan Quan, Kai-Yuan Cai
The Degree of Controllability with Limited Input and an Application for Hexacopter Design
The 32nd Chinese control conference, Xi’an, 2013, 113-118. (in Chinese) [pdf]
Jiang Wang, Qiang Fu, Quan Quan, Kai-Yuan Cai
Binocular Visual Tracking Based on Kalman filter and Histogram Matching
The 32nd Chinese control conference, Xi’an, 2013, 3691-3696. (in Chinese) [pdf]
2012
Quan Quan, Kai-Yuan Cai
A new method to obtain ultimate bounds and convergence rates for perturbed time-delay systems
International Journal of Robust and Nonlinear Control, 2012, 22(16):1873-1880. [pdf]
Quan Quan, Kai-Yuan Cai
A stability theorem of the direct Lyapunov's method for neutral type systems in a critical case
International Journal of Systems Science, 2012,43(4):641-646. [pdf]
Quan Quan, Kai-Yuan Cai
Time-Domain analysis of the Savitzky-Golay filters
Digital Signal Processing, 2012,22(2):238-245. [pdf] [ Code ]
Quan Quan, Kai-Yuan Cai
Additive-Output-Decomposition-Based Dynamic Inversion Tracking Control for a Class of Uncertain Linear Time-Invariant Systems
The 51st IEEE Conference on Decision and Control, 2012, Maui, Hawaii, USA, 2866-2871. [pdf]
Guang-Xun Du, Quan Quan, Kai-Yuan Cai
Implicit Kalman filter for position estimation with visual and inertial sensor fusion
Control Theory & Applications, 2012, 29(7): 833-840. [pdf]
Zibo Wei, Quan Quan, Kai-Yuan Cai
Research on Relationship between Drogue Position and Interference Force for Probe-Drogue Aerial Refueling System Based on Link-connected Model
Proceedings of the 31st Chinese Control Conference, 2012, Hefei, China . (in Chinese) [pdf]
Zhongfang Zhang, Quan Quan, Kai-YuanCai
A Method for Satellite Residual Service Life Prediction Based on Markov Model
The 3rd Chinese Guidance, Navigation and Control Conference, Beijing, 2009, 487-493 [pdf]
2011
Quan Quan, Kai-Yuan Cai
A filtered repetitive controller for a class of nonlinear systems
IEEE Transaction on Automatic Control, 2011, 56(2): 399-405. [pdf]
Quan Quan, Kai-Yuan Cai
Filtered repetitive control of robot manipulators
International Journal of Innovative Computing, Information and Control, 2011, Vol. 7, No. 5(A): 2405-2415. [pdf]
Ruifeng Zhang, Quan Quan, Kai-Yuan Cai
Attitude control of a quadrotor aircraft subject to a class of time-varying disturbances
IET Control Theory & Applications, 2011, 5(9): 1140-1146. [pdf]
Wael Mohsen Ahmed, Quan Quan
Hybrid robust control for ballistic missile longitudinal autopilot
Chinese Journal of Aeronautics, 2011, 24(6): 777-788. [pdf]
Xuedong Li, Quan Quan, Kai-Yuan Cai
Noise analysis and external parameters calibration for binocular fisheye cameras
Proceedings of the 30th Chinese Control Conference, 2011: 5017-5022. (in Chinese) [pdf]
Qiang Fu, Quan Quan, Kai-Yuan Cai
Multi-camera calibration based on freely moving one dimensional
Proceedings of the 30th Chinese Control Conference, 2011: 5023-5028. (in Chinese) [pdf]
2010
Quan Quan, Dedong Yang, Hai Hu, Kai-Yuan Cai
A new model transformation method and its application to extending a class of stability criteria of neutral type systems
Nonlinear Analysis: Real World Applications, 2010, 11(5): 3752-3762. [pdf]
Quan Quan, Kai-Yuan Cai
Robustness analysis of a class of linear neutral systems in a critical case
IET Control Theory & Applications, 2010, 4(9):1807-1816. [pdf]
Quan Quan, Dedong Yang, Kai-Yuan Cai
Linear matrix inequality approach for stability analysis of linear neutral systems in a critical case
IET Control Theory & Applications, 2010, 4(7):1290-1297. [pdf]
Quan Quan, Kai-Yuan Cai
A survey of repetitive control for nonlinear systems
Science Foundation in China, 2010, 18(2): 45-53. [pdf]
Quan Quan, Dedong Yang, Kai-Yuan Cai
Adaptive compensation for robust tracking of uncertain dynamic delay systems
Acta Automatica, 2010, 36 (8): 1189-1194. [pdf]
Quan Quan, Kai-Yuan Cai
A framework for the stability of a class of neutral type systems in a critical case
Proceedings of the 29th Chinese Control Conference, Beijing, 2010, 90- 95. [pdf]
Quan Quan, Kai-Yuan Cai
A new viewpoint on the internal model principle and its application to periodic signal tracking
The 8th World Congress on Intelligent Control and Automation, Shandong, Jinan, 2010, 1162-1167. [pdf]
before
Quan Quan, Dedong Yang, Kai-Yuan Cai and Jiang Jun
Repetitive control by output error for a class of uncertain time-delay systems
IET Control Theory & Applications, 2009, 3(9): 1283-1292. [pdf]
Quan Quan and Kai-Yuan Cai
Additive decomposition and its applications to Internal-model-based tracking
Joint 48th IEEE Conference on Decision and Control and 28th Chinese Control Conference, 2009, Shanghai, 817-822. [pdf]
Bo Zhu, Quan Quan, Kai-Yuan Cai
Desirable attitude angles design based on optimization for side window detection of kinetic interceptor
Proceedings of the 27th Chinese Control Conference, 2008: 592-597.[pdf]
Quan Quan, Xinhua Wang, Kai-Yuan Cai
Higher-order adaptive iterative control for uncertain robot manipulators
Proceedings of the 26th Chinese Control Conference, 2007: 825-829.[pdf]
Bo Zhu, Quan Quan, Kai-Yuan Cai
BP networks method of handing-over point of KKV
Journal of Beijing University of Aeronautics and Astronautics, 2007, 33(3): 332-335. (in Chinese).[pdf]
Quan Quan, Kai-Yuan Cai
Control of attitude of the space interceptor based decision tree
Journal of Beijing University of Aeronautics and Astronautics, 2006, 32(10):1163-1167. (in Chinese). [pdf]
![]()
Copyright © rfly.buaa.edu.cn. All Rights Reserved.
Home | Contact | BUAA | Flyeval.com